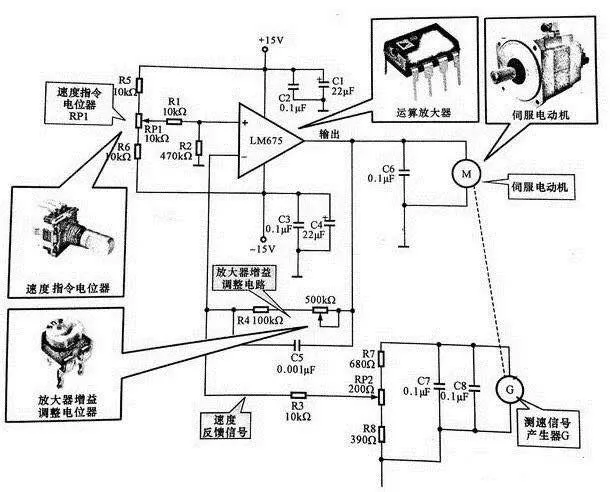
Le rôle du servomoteur est de convertir le signal de tension d'entrée (c'est-à-dire la tension de commande) en un déplacement angulaire ou une sortie de vitesse angulaire sur l'arbre. Il est souvent utilisé comme actionneur dans un système de contrôle automatique. Par conséquent, le servomoteur est également appelé un moteur d'actionnement. Sa principale caractéristique est: Le rotor tourne immédiatement lorsque la tension est contrôlée, et le rotor s'arrête immédiatement lorsqu'il n'y a pas de tension de commande. La direction et la vitesse de l'arbre sont déterminées par la direction et l'amplitude de la tension de commande. Les servomoteurs sont divisés en deux grandes catégories: AC et DC.
1. Structure de base
Le servomoteur AC est principalement composé d'un stator et d'un rotor.
Le noyau du stator est généralement laminé avec une tôle d'acier au silicium. Des enroulements biphasés sont noyés dans les fentes à la surface du noyau du stator. Un enroulement de phase est un enroulement de champ et l'autre enroulement de phase est un enroulement de commande. Les enroulements biphasés sont distants de 90 degrés les uns des autres en position spatiale. Pendant le fonctionnement, l'enroulement de champ f est connecté à la source d'alimentation d'excitation alternative, et l'enroulement de commande k est ajouté à la tension de signal de commande Uk.
Principalement composé de: stator 1, rotor 5 et élément de détection 8 et autres pièces.

2. Principe de fonctionnement
Lorsqu'il n'y a pas de tension de commande dans le servomoteur à courant alternatif, seul le champ magnétique pulsé généré par l'enroulement de champ est présent dans l'entrefer, et il n'y a pas de couple de démarrage sur le rotor et il est stationnaire. Lorsqu'il y a une tension de commande et que le courant d'enroulement de commande et le courant d'enroulement de champ sont déphasés, un champ magnétique tournant est généré dans l'entrefer et un couple électromagnétique est généré pour faire tourner le rotor dans la direction du champ magnétique tournant. Cependant, les exigences du servomoteur peuvent être démarrées non seulement sous la tension de commande, mais également après la disparition de la tension, le moteur doit s'arrêter immédiatement. Si la tension de commande du servomoteur disparaît et continue de tourner comme un moteur asynchrone monophasé normal, un phénomène d'emballement se produit. Nous appelons ce phénomène d'auto-rotation dû à une perte de contrôle.
3. Méthode de contrôle
La métaphysique peut utiliser les trois méthodes suivantes pour contrôler la vitesse et le sens de rotation du servomoteur.
(1) Contrôle d'amplitude Maintenez la différence de phase entre la tension de commande et la tension d'excitation constante et ne modifiez que l'amplitude de la tension de commande.
(2) Contrôle de phase Maintenez l'amplitude de la tension de commande constante et ne changez que la différence de phase entre la tension de commande et la tension d'excitation.
(3) Contrôle amplitude-phase Modifiez simultanément l'amplitude et la phase de la tension de commande.
Deuxièmement, servomoteur à courant continu
1. Structure de base
Le servomoteur CC traditionnel est essentiellement un moteur CC normal de petite capacité. Il a deux types d'excitation et d'aimant permanent, et sa structure est fondamentalement la même que celle d'un moteur à courant continu ordinaire.
Le rotor du servomoteur à courant continu à armature en forme de coupelle est constitué d'un cylindre creux en forme de coupelle fait d'un matériau non magnétique, et le rotor est léger, de sorte que le moment d'inertie est petit et la réponse est rapide. Le rotor tourne entre les stators intérieur et extérieur en matériau magnétique doux avec un grand entrefer.
Le servomoteur CC sans balais remplace la brosse et le commutateur conventionnels par un dispositif d'inversion électronique, ce qui le rend plus fiable. Sa structure de noyau de stator est fondamentalement la même que celle d'un moteur à courant continu commun, dans lequel un enroulement multiphasé est intégré, et le rotor est constitué d'un matériau à aimant permanent.
2. Principe de fonctionnement de base
Le principe de fonctionnement de base du servomoteur CC traditionnel est exactement le même que celui du moteur CC ordinaire. Le couple électromagnétique est généré par l'action du courant d'induit et du flux d'entrefer pour faire tourner le servomoteur. Le mode de contrôle d'induit est généralement adopté, c'est-à-dire que la vitesse de rotation est ajustée en modifiant la tension d'induit tout en maintenant la tension d'excitation constante. Plus la tension d'induit est petite, plus la vitesse de rotation est faible; lorsque la tension d'induit est nulle, le moteur s'arrête. Puisque le courant d'induit est nul lorsque la tension d'induit est nulle, le moteur ne génère pas de couple électromagnétique et il n'y a pas de "rotation".
Troisièmement, la différence entre les servomoteurs AC et DC
Inconvénients du servomoteur DC:
une. Les balais et les commutateurs sont sujets à l'usure, aux étincelles lors de la commutation, à la vitesse limite
b. Structure complexe, difficile à fabriquer, coût élevé
Avantages du servomoteur AC:
c. Structure simple, faible coût et faible inertie du rotor par rapport aux moteurs à courant continu
ré. La capacité du moteur à courant alternatif est supérieure à celle du moteur à courant continu
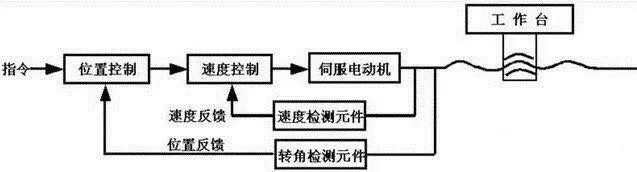
Exigences de performance du système servo
Tout d'abord, les exigences de base
1, précision de déplacement élevée
Précision de déplacement: fait référence au degré de conformité entre l'impulsion de commande et le déplacement de la table de la machine et le déplacement réel de l'impulsion de commande convertie dans la table par le système d'asservissement.
2, bonne stabilité
Stabilité: Le système d'asservissement peut atteindre un nouveau ou revenir à l'état d'équilibre d'origine après un court processus de réglage sous l'entrée donnée ou une perturbation externe.
3, haute précision de positionnement
Précision de positionnement: fait référence à la précision de la sortie peut reproduire l'entrée
4, une réponse rapide est bonne
5, large plage de vitesse
Plage de régulation de vitesse: fait référence au rapport entre la vitesse maximale et la vitesse minimale que le dispositif mécanique demande au moteur de fournir.
6, la fiabilité du système est bonne
7, faible vitesse et grand couple
Deuxièmement, la classification du système d'asservissement
Selon la classification de la théorie de l'ajustement du système d'asservissement
a, système d'asservissement en boucle ouverte
c, système d'asservissement en boucle semi-fermée